Thursday, November 2, 2023
Keyboard with joysticks (part 4): PSP 2000 joystick added
Previous parts:
As I don’t want to wait until missing part arrives I have decided to give another chance to PSP 2000. It is a shitty joystick, but actually it works. Here how it looks like on my keyboard:

As suggested by u/MexPayneDive20 I have cut some plastic and soldered wires
directly. I am not sure if that has any side effects or this joystick is really
shitty, but again min axis value is not 0 but something about 250 (and actually
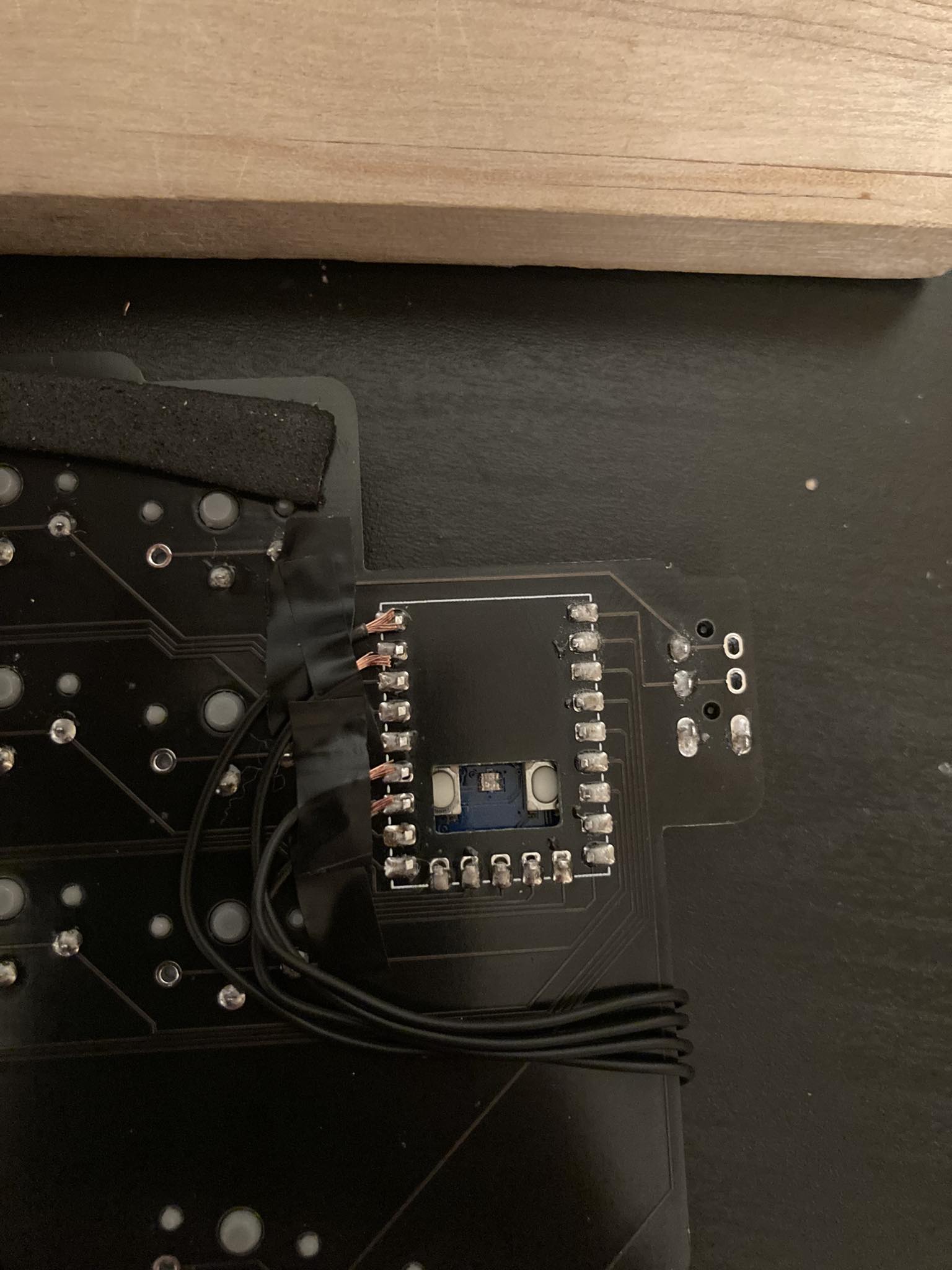
different for X and Y). In other side I have soldered to 5V, GND, GP26 to X and
GP27 to Y. Here is how it looks like in other side before soldering:
It is kinda usable, but I had to make some changes. Here is full QMK code for the keyboard (work in progress, naturally):
https://github.com/daliusd/qmk_firmware/commits/joyride-w
Now again it is really shitty joystick and when I move it to left it is not returning to start position and starts sliding to left (wondering pointer issue). I am using code from this PR (https://github.com/qmk/qmk_firmware/pull/21883 - it is not yet in QMK master) and I solved wondering pointer by settings initial weights to zero.
I have added scrolling on joystick when I click NAV layer button and had to make it slower. Good thing it is documented here:
https://github.com/qmk/qmk_firmware/blob/master/docs/feature_pointing_device.md
So I will use this for a while and will search how I can improve it further. As I am not happy that you must somehow figure out what’s axis min value for your keyboard.
Now if you want to try this out you will need branch mentioned above and those two commands:
make handwired/joyride:default:uf2-split-left
make handwired/joyride:default:uf2-split-rightBTW, if you want to figure out what’s min axis value for your keyboard you can do it like this.
Enabled debugging in rules.mk by adding line:
CONSOLE_ENABLE = yesModify drivers/sensors/analog_joystick.c by adding:
#include "print.h"
...
uprintf("Read %ld %d\n", pin, position); // you will find where to add thisUse hidlisten (https://www.pjrc.com/teensy/hid_listen.html) utility to see
output. On Ubuntu I compile it and run:
sudo ./hidlisten